核心应用板
STM32控制板
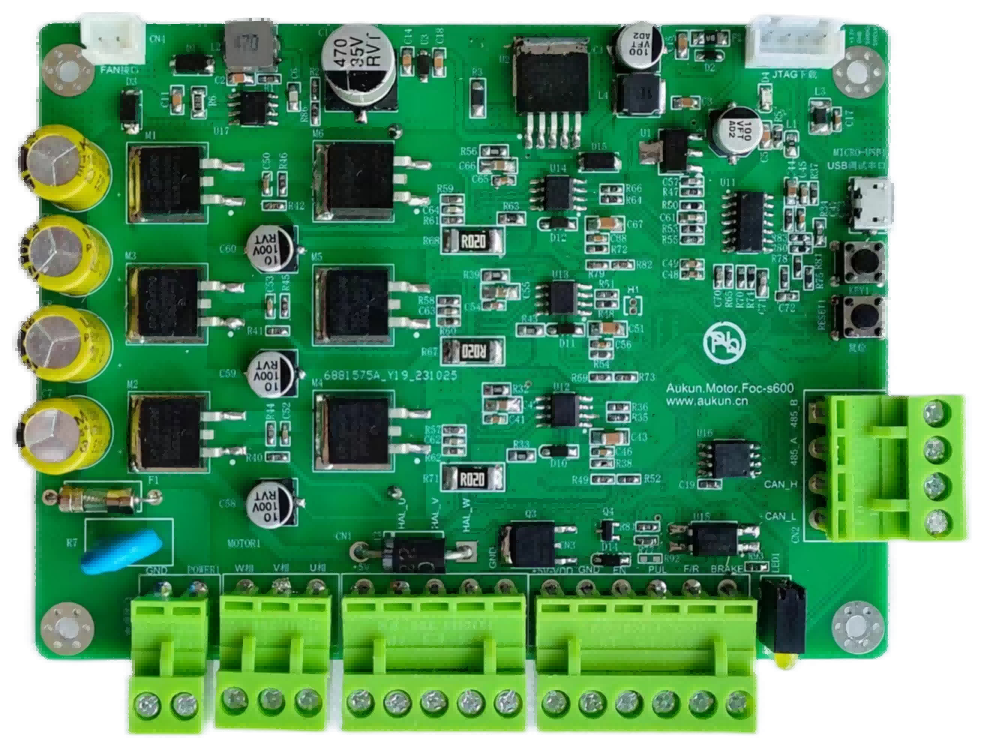
电机FOC驱动器